PIC Microcontroller
PIC microcontroller was developed in the year 1993 by microchip technology. The term PIC stands for Peripheral Interface Controller. Initially this was developed for supporting PDP computers to control its peripheral devices, and therefore, named as a peripheral interface device. These microcontrollers are very fast and easy to execute a program compared with other microcontrollers. PIC Microcontroller architecture is based on Harvard architecture. PIC microcontrollers are very popular due to their ease of programming, wide availability, easy to interfacing with other peripherals, low cost, large user base and serial programming capability (reprogramming with flash memory), etc.
We know that the microcontroller is an integrated chip which consists of CPU, RAM, ROM, timers, and counters, etc. In the same way, PIC microcontroller architecture consists of RAM, ROM, CPU, timers, counters and supports the protocols such as SPI, CAN, and UART for interfacing with other peripherals. At present PIC microcontrollers are extensively used for industrial purpose due to low power consumption, high performance ability and easy of availability of its supporting hardware and software tools like compilers, debuggers and simulators.
What is a PIC Microcontroller?
PIC (Programmable Interface Controllers) microcontrollers are the worlds smallest microcontrollers that can be programmed to carry out a huge range of tasks. These microcontrollers are found in many electronic devices such as phones, computer control systems, alarm systems, embedded systems, etc. Various types of microcontrollers exist, even though the best are found in the GENIE range of programmable microcontrollers. These microcontrollers are programmed and simulated by a circuit-wizard software.
Every PIC microcontroller architecture consists of some registers and stack where registers function as Random Access Memory( RAM) and stack saves the return addresses. The main features of PIC microcontrollers are RAM, flash memory, Timers/Counters, EEPROM, I/O Ports, USART, CCP (Capture/Compare/PWM module), SSP, Comparator, ADC (analog to digital converter), PSP(parallel slave port), LCD and ICSP (in circuit serial programming) The 8-bit PIC microcontroller is classified into four types on the basis of internal architecture such as Base Line PIC, Mid Range PIC, Enhanced Mid Range PIC and PIC18
Architecture of PIC Microcontroller
The PIC microcontroller architecture comprises of CPU, I/O ports, memory organization, A/D converter, timers/counters, interrupts, serial communication, oscillator and CCP module which are discussed in detailed below.
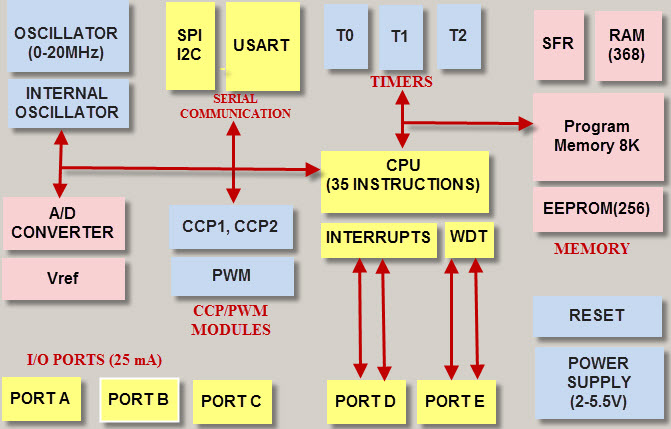
Architecture of PIC Microcontroller
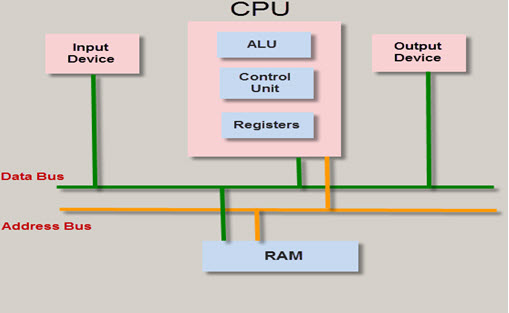
CPU (Central Processing Unit)
It is not different from other microcontrollers CPU and the PIC microcontroller CPU consists of the ALU, CU, MU and accumulator, etc. Arithmetic logic unit is mainly used for arithmetic operations and to take logical decisions. Memory is used for storing the instructions after processing. To control the internal and external peripherals, control unit is used which are connected to the CPU and the accumulator is used for storing the results and further process.
Memory Organization
The memory module in the PIC microcontroller architecture consists of RAM (Random Access Memory), ROM (Read Only Memory) and STACK.
Random Access Memory (RAM)
RAM is an unstable memory which is used to store the data temporarily in its registers. The RAM memory is classified into two banks, and each bank consists of so many registers. The RAM registers are classified into two types: Special Function Registers (SFR) and General Purpose Registers (GPR).
-
General Purpose Registers (GPR)
These registers are used for general purpose only as the name implies. For example, if we want to multiply two numbers by using the PIC microcontroller. Generally, we use registers for multiplying and storing the numbers in other registers. So these registers don’t have any special function,- CPU can easily access the data in the registers.
-
Special Function Registers
These registers are used for special purposes only as the name SFR implies. These registers will perform according to the functions assigned to them , and they cannot be used as normal registers. For example, if you cannot use the STATUS register for storing the data, these registers are used for showing the operation or status of the program. So, user cannot change the function of the SFR; the function is given by the retailer at the time of manufacturing.

Memory Organization
Read Only Memory (ROM)
Read only memory is a stable memory which is used to store the data permanently. In PIC microcontroller architecture, the architecture ROM stores the instructions or program, according to the program the microcontroller acts. The ROM is also called as program memory, wherein the user will write the program for microcontroller and saves it permanently, and finally the program is executed by the CPU. The microcontrollers performance depends on the instruction, which is executed by the CPU.
Electrically Erasable Programmable Read Only Memory (EEPROM)
In the normal ROM, we can write the program for only once we cannot use again the microcontroller for multiple times. But, in the EEPROM, we can program the ROM multiple times.
Flash Memory
Flash memory is also programmable read only memory (PROM) in which we can read, write and erase the program thousands of times. Generally, the PIC microcontroller uses this type of ROM.
Stack
When an interrupt occurs, first the PIC microcontroller has to execute the interrupt and the existing process address. Then that is being executed is stored in the stack. After completing the execution of the interrupt, the microcontroller calls the process with the help of address, which is stored in the stack and get executes the process.
I/O Ports
- The series of PIC16 consists of five ports such as Port A, Port B, Port C, Port D & Port E.
- Port A is an 16-bit port that can be used as input or output port based on the status of the TRISA (Tradoc Intelligence Support Activity) register.
- Port B is an 8- bit port that can be used as both input and output port.
- Port C is an 8-bit and the input of output operation is decided by the status of the TRISC register.
- Port D is an 8-bit port acts as a slave port for connection to the microprocessor BUS.
- Port E is a 3-bit port which serves the additional function of the control signals to the analog to digital converter.
BUS
BUS is used to transfer and receive the data from one peripheral to another. It is classified into two types such as data bus and address.
Data Bus: It is used for only transfer or receive the data.
Address Bus: Address bus is used to transmit the memory address from the peripherals to the CPU. I/O pins are used to interface the external peripherals; UART and USART both are serial communication protocols which are used for interfacing serial devices like GSM, GPS, Bluetooth, IR , etc.
BUS
A/D converters
The main intention of this analog to digital converter is to convert analog voltage values to digital voltage values. A/D module of PIC microcontroller consists of 5 inputs for 28 pin devices and 8 inputs for 40 pin devices. The operation of the analog to digital converter is controlled by ADCON0 and ADCON1 special registers. The upper bits of the converter are stored in register ADRESH and lower bits of the converter are stored in register ADRESL. For this operation, it requires 5V of an analog reference voltage.
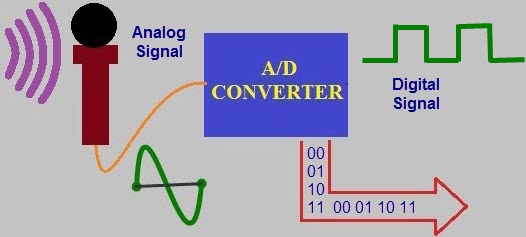
A/D CONVERTER
Timers/ Counters
PIC microcontroller has four timer/counters wherein the one 8-bit timer and the remaining timers have the choice to select 8 or 16-bit mode. Timers are used for generating accuracy actions, for example, creating specific time delays between two operations.
Interrupts
PIC microcontroller consists of 20 internal interrupts and three external interrupt sources which are associated with different peripherals like ADC, USART, Timers, and so on.
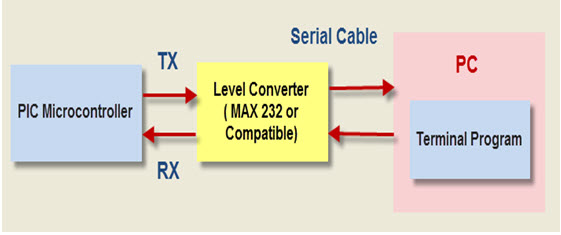
Serial Communication
Serial communication is the method of transferring data one bit at a time sequentially over a communication channel.
- USART: The name USART stands for Universal synchronous and Asynchronous Receiver and Transmitter which is a serial communication for two protocols. It is used for transmitting and receiving the data bit by bit over a single wire with respect to clock pulses. The PIC microcontroller has two pins TXD and RXD. These pins are used for transmitting and receiving the data serially.
- SPI Protocol: The term SPI stands for Serial Peripheral Interface. This protocol is used to send data between PIC microcontroller and other peripherals such as SD cards, sensors and shift registers. PIC microcontroller support three wire SPI communications between two devices on a common clock source. The data rate of SPI protocol is more than that of the USART.
- I2C Protocol: The term I2C stands for Inter Integrated Circuit , and it is a serial protocol which is used to connect low speed devices such as EEPROMS, microcontrollers, A/D converters, etc. PIC microcontroller support two wire Interface or I2C communication between two devices which can work as both Master and Slave device.
Serial Communication
Oscillators
Oscillators are used for timing generation. Pic microcontroller consist of external oscillators like RC oscillators or crystal oscillators. Where the crystal oscillator is connected between the two oscillator pins. The value of the capacitor is connected to every pin that decides the mode of the operation of the oscillator. The modes are crystal mode, high-speed mode and the low-power mode. In case of RC oscillators, the value of the resistor & capacitor determine the clock frequency and the range of clock frequency is 30KHz to 4MHz.
CCP module
The name CCP module stands for capture/compare/PWM where it works in three modes such as capture mode, compare mode and PWM mode.
- Capture Mode: Capture mode captures the time of arrival of a signal, or in other words, when the CCP pin goes high, it captures the value of the Timer1.
- Compare Mode: Compare mode acts as an analog comparator. When the timer1 value reaches a certain reference value, then it generates an output.
- PWM Mode: PWM mode provides pulse width modulated output with a 10-bit resolution and programmable duty cycle.
PIC Microcontroller Applications
The PIC microcontroller projects can be used in different applications, such as peripherals, audio accessories, video games, etc. For better understanding of this PIC microcontroller, the following project demonstrates PIC microcontroller’s operations.
Street Light that Glows on Detecting Vehicle Movement:
The main intention of this project is to detect the movement of vehicles on highways to switch on a block of street lights ahead of it, and also switch off the trailing lights to conserve energy. In this project, a PIC microcontroller is done by using assembly language or embedded C.
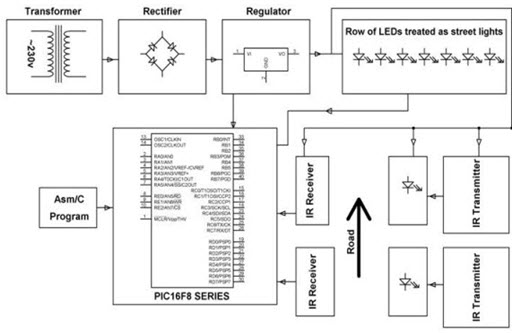
Street Light that Glows on Detecting Vehicle Movement by Edgefxkits.com
The power supply gives the power to the total circuit by stepping down, rectifying, filtering and regulating AC mains supply. When there are no vehicles on highway, then all lights will turn OFF so that the power can be conserved. The IR sensors are placed on the road to sense the vehicle movement. When there are vehicles on highway, then the IR sensor senses the vehicle movement immediately, it sends the commands to the PIC microcontroller to switch ON/OFF the LEDs. A bunch of LEDS will be turned on when a vehicle come near to the sensor and once the vehicle passes away from the sensor the intensity will become lower than the LEDs will turn OFF
Advantages of PIC Microcontroller:
- PIC microcontrollers are consistent and faulty of PIC percentage is very less. The performance of the PIC microcontroller is very fast because of using RISC architecture.
- When comparing to other microcontrollers, power consumption is very less and programming is also very easy.
- Interfacing of an analog device is easy without any extra circuitry
Disadvantages of PIC Microcontroller:
- The length of the program is high due to using RISC architecture (35 instructions)
- One single accumulator is present and program memory is not accessible
Please refer to this link to know more about ARM Architecture MCQs & Microcontrollers MCQs
Please refer to this link to know more about 8051 Microcontroller Projects.
Thus, this is all about PIC microcontroller tutorial which includes PIC microcontroller architecture, advantages, disadvantage and applications. Apart from this, for any help regarding any electronic and electrical projects, you can contact us by commenting in the comment section below.