Communication protocols are a set of rules for ECUs that define how electronic control units exchange data with common protocols like CAN, Ethernet, LIN, and FlexRay. These communication protocols can normalize message formats, error detection, data rates, and timing. Thus, ensures efficient and consistent communication between devices within complex systems like industrial equipment and vehicles. Similarly, CAN FD is an enhanced communication protocol for ECUs that provides larger data payloads and higher bandwidth than classical CAN. This article elaborates on CAN FD, its working, and its applications.
What is CAN FD?
CAN FD (Controller Area Network with Flexible Data-Rate) is an extension of the classic CAN bus that allows for larger message sizes and faster data transfer rate, required for modern automotive systems like ADAS. This protocol can switch in the same message frame to a faster data rate by allowing up to 8 megabits/sec data speeds, which is up to five times compared than classic CAN. Therefore, this protocol can support larger message payloads that range from 8 bytes in classic CAN to 64 bytes in CAN FD.
This improves the efficiency by decreasing the required number of frames for a specified amount of data. The protocol dynamically switches between slower and faster bit rates in a single frame to optimize communication performance. The CAN FD controller is capable of communicating with devices through the classic CAN protocol.
How CAN FD Work?
CAN FD works with two different bit rates in a single message frame by allowing faster data transmission for the payload while maintaining a standard, slower bit rate for the primary arbitration. Therefore, it improves the data payload in classic CAN from 8 bytes to up to 64 bytes by using up to 8 Mbps higher bit rate in the data phase to enhance overall efficiency and bandwidth.
- First, the process begins at a normal and slower CAN bit rate for arbitration by ensuring compatibility through classical CAN systems, where nodes can struggle for bus access.
- When arbitration is finished, the bit rate will switch to a higher speed, mainly for data transmission. Therefore, this faster speed can be used for the data field & the CRC field.
- The bit rate switches back to the slower, nominal rate before the frame finishes, particularly before the acknowledge bits are transmitted and after the CRC delimiter.
- The ability to transmit more data within a single frame decreases the number of frames required for large data transfers.
- Therefore, this protocol uses more stronger CRC algorithm over the classical CAN protocol, which enhances error detection mainly for larger data payloads.
CAN FD Specifications
The CAN FD specifications include the following.
- CAN FD is an improved CAN standard protocol.
- It increases the payload size maximum to 64 bytes, as compared to 8 bytes of Classical CAN.
- This protocol supports a faster and flexible data bit rate, normally up to 8 Mbps, in the frame’s data phase.
- It maintains the classical 1 Mbps of Arbitration bit rate to ensure backward compatibility with previous CAN networks for the arbitration field.
- Frame format can be modified to have a BRS bit within the control field to signal the transformation to a quick data bit rate.
- CAN FD protocol uses two different bit rates for various parts of a message.
- It can be much higher, from 2 to 5 Mbit/s, depending on the physical layer quality of the network.
- The payload size can be changeable with different options like 8, 12, 16, 20, 24, 32, 48 & 64 bytes.
- In addition, it uses an 11-bit identifier for the 29-bit identifier/ base frame format for the comprehensive frame format.
- It features a better error detection mechanism, like a longer, 17-bit/ 21-bit CRC as compared to the 15-bit CRC of classical CAN.
- It needs a CAN FD-compatible controller to manage the higher data rates.
- The highest data bit rate achievement mainly depends on the excellence of the physical layer.
- It features better CRC (Cyclic Redundancy Check) & a protected stuff-bit counter to improve reliability and decrease undetected errors.
CAN FD Protocol Architecture
CAN FD protocol architecture is an improved version of the Classical CAN protocol. It allows a higher, flexible data rate & larger message payloads. Therefore, the main features of this protocol are: a flexible data rate that enables the faster transmission of the CRC, data field, and a larger payload capacity of up to 64 bytes, as well as improved error detection through longer CRC fields. This can be achieved by using a lower bit rate for arbitration, while switching to a higher bit rate for the CRC and data portions of the frame.
CAN FD Protocol Architecture
Components
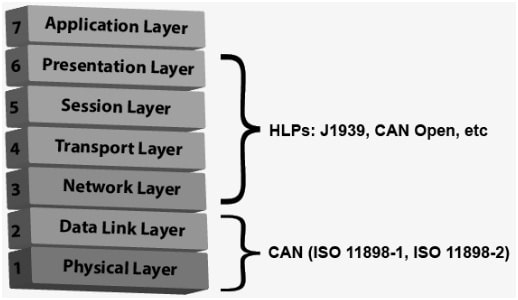
The CAN FD protocol architecture is a three-layered structure, like the Physical Layer, the Data Link Layer & the Object Layer, with key enhancements above classical CAN. The Physical Layer can support two different bit rates, and the Data Link Layer is used for data transfer and arbitration, like the use of a separate BRS (bit rate switching) bit for the quick data phase. At last, the Object Layer handles message filtering & prioritization that can contain communication objects like SYNC, NMT, and PDO related to CANopen FD.
Physical Layer
The physical layer of this protocol is mostly the same as that of classical CAN, which uses a similar bus topology & hardware like wiring and transceivers. This protocol places stricter demands on physical network design parameters to attain higher bit rates in the data phase, which need CAN FD-compatible controllers & transceivers to manage faster switching speeds.
This layer defines the electrical & mechanical network characteristics like signal voltage, bit rate, and the transmission medium like twisted-pair wires. It supports higher bitrates, particularly in the data phase of a message transmission that requires a higher-quality physical layer to keep signal integrity. Its key factors comprise the bus wiring quality, transceiver performance & ensuring whether the network can maintain signal integrity at the higher speeds.
Data Link Layer
The Data Link Layer of the CAN FD protocol is accountable for reliable data transmission between nodes on classical CAN with two separate bit timings for arbitration & data phases by supporting up to 64 bytes longer frames.
Therefore, it formats data into frames, manages physical addressing & ensures error-free transmission through Cyclic Redundancy Check mechanisms. This protocol expands classical CAN by permitting a faster data rate and larger payload for the data payload while keeping compatibility through the existing arbitration device.
Object Layer
The Object Layer in the CAN FD protocol architecture is frequently known as the Logical Link Layer. It is a higher-level layer, accountable for handling message filtering, prioritization, and buffering before messages are sent to the data link layer for transmission. It acts as the interface between the application and the CAN FD controller to handle the data movement from and to the buffers of controllers and arrange it for bus access.
Message Format of CAN FD
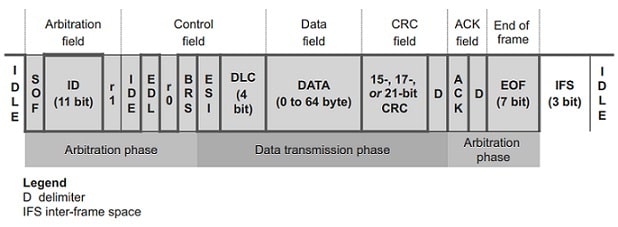
A CAN FD or Controller Area Network Flexible Data-Rate message format features different fields like an Arbitration ID with 11 bits or 29 bits, a Control field through the FDF (Flexible Data-Rate format) and BRS (Bit Rate Switch) indicators, a Data field with up to 64 bytes, a varying length CRC (Cyclic Redundancy Check) & an ACK (Acknowledgement) field. The main improvements over classic CAN are the bigger data payload & the switching ability to a higher bit rate in the transmission’s data phase.
CAN FD Protocol Message Format
Arbitration Field
This field has the message ID that can be an 11-bit identifier or a 29-bit identifier.
Control Field
This field has three bits like FDF, BRS, and ESI, which are explained below.
- FDF or Flexible Data-Rate Format bit identifies the frame, similar to a CAN FD frame versus a classic CAN frame.
- BRS or Bit Rate Switch is a dominant bit that maintains the bit rate the same as the arbitration phase, when a recessive bit permits the data phase to control a faster bit rate.
- ESI or Error State Indicator indicates the error condition of a CAN FD node.
- DLC or Data Length Code indicates the number of bytes within the Data field, ranging from 0 bytes to 64 bytes for protocol, an increase from the 8-byte limit within classic CAN.
Data Field includes the genuine payload data where its size ranges from 0 bytes to 8, 12, 16, 20, 24, 32, 48, or 64 bytes.
CRC Field is a checksum that ensures data integrity. So the CRC length is variable based on the data length through the protocol, with 21 bits or 17 bits in place of the 15-bit CRC within classic CAN.
ACK Field is used for acknowledgements from receiving nodes.
CAN Vs CAN FD
There are many difference between CAN and CAN FD which one needs to understand for better usage. Know its differences from Difference between CAN and CAN FD
The advantages of CAN FD include the following.
- This protocol supports a bit rate up to 5 Mbps or higher within the data phase, extensively improving communication speed as compared to classical CAN’s 1 Mbps.
- It improves the data payload for each frame that ranges from 8 bytes to 64 bytes.
- It needs less protocol overhead & fewer frames to send a large amount of data by enhancing overall bus use.
- The increased speed decreases latency, which leads to faster response times in industrial control or autonomous vehicle applications.
- Faster communication allows quicker firmware updates, mainly for ECUs.
- It enhances error detection abilities with a superior cyclic redundancy check algorithm that decreases the risk of undetected errors in transmission.
- The dual bit is separated to ensure the reliability of control signals while accelerating data transfer.
- It is an expansion of the classic CAN protocol that allows a phased, smooth upgrade path & the mixing of CAN FD and CAN nodes on the same network in certain conditions.
Disadvantages
The disadvantages of CAN FD include the following.
- Its main drawback is a lack of backward compatibility through classical CAN on the same bus. So it needs hardware upgrades & the improved complexity in troubleshooting and design because of higher speeds & potential signal integrity problems.
- It has an inherent lack of built-in safety features.
- CAN FD protocol is not directly well-matched with classical CAN on the same bus.
- A CAN FD node disturbs communication for legacy CAN nodes, requiring the use of partial networking solutions or gateways for mixed networks.
- A complete upgrade to CAN FD protocol needs compatible transceivers and controllers, which can be expensive, particularly for systems with a large installed base of previous CAN nodes.
- Higher data rates improve the potential for errors and reflections of the signal that need a more cautious physical network layout & analysis.
- These are less significant for applications that simply transmit small amounts of data at fewer frequencies. So it potentially makes a needless upgrade in those cases.
- CAN FD frames include more overhead bits as compared to classical CAN frames..
- This protocol does not have fixed features like classical CAN for authentication or encryption, making it susceptible to denial-of-service or spoofing attacks.
Applications
The CAN FD applications include the following.
- CAN FD is used mostly in the automotive industry, robotics, medical equipment, and industrial automation. Therefore, its superior capabilities for larger message sizes and faster data rates will make it perfect for current systems with high data demands.
- It provides the low-latency and high-speed communication required for safety-critical functions.
- It supports the high amount of required data or battery management systems, complex electrical systems, or traction inverters.
- It allows for more efficient and faster firmware updates, mainly for electronic control units.
- This protocol allows reliable and precise control within complex systems, particularly for communication between various host actuators.
- It captures large amounts of data for analysis in fleet tracking & insurance black box applications.
- This protocol is used in tools to test and develop networks within a simulated environment to ensure real-time performance.
- It is used in Industrial Automation systems for cabinets, drives & controlling a variety of parts of an automated factory floor.
- It is suitable for applications that need consistent data communication between different components.
- It is used in access control systems, air conditioning management, and elevators.
Conclusion:
In summary, the CAN FD protocol with Flexible Data Rate is an important evolution of the classic CAN protocol. It is designed to meet the rising bandwidth demands of current industrial and automotive applications. CAN FD protocol effectively bridges the main gap between the reliable and strong establishment of classic CAN. Therefore, the demands of high-data-rate communication systems and modern technologies ensure a network. Therefore, it manages data-intensive and complex applications securely and efficiently. Here is a question for you: What is the CAN protocol?